Systemübersicht
Dieses Kapitel zeigt einen Beispielaufbau: Ein UR5e‑Roboter wird um einen Festo‑Servoantrieb erweitert.
Funktionsprinzip
Der UR5e‑Roboter besteht aus dem Roboterarm und der Robotersteuerung, auf der Polyscope und die URCap esaDrive laufen. Ein zusätzlicher Antrieb umfasst den Motor und den zugehörigen Antriebsregler. Die Robotersteuerung ist über ein Ethernet‑Kabel mit dem Antriebsregler verbunden und tauscht über Modbus‑TCP Bewegungsbefehle (z. B. Position, Geschwindigkeit) sowie Status‑ und Diagnosedaten (z. B. Ist‑Position, Fehlercodes) aus. Die URCap übernimmt dabei die gesamte Kommunikation und stellt im Roboterprogramm neue Nodes bereit, mit denen sich der Servoantrieb nahtlos wie eine weitere Achse steuern lässt.
Mit der URCap esaDrive können bis zu 6 zusätzliche Antriebe gleichzeitig an die Robotersteuerung angeschlossen werden.
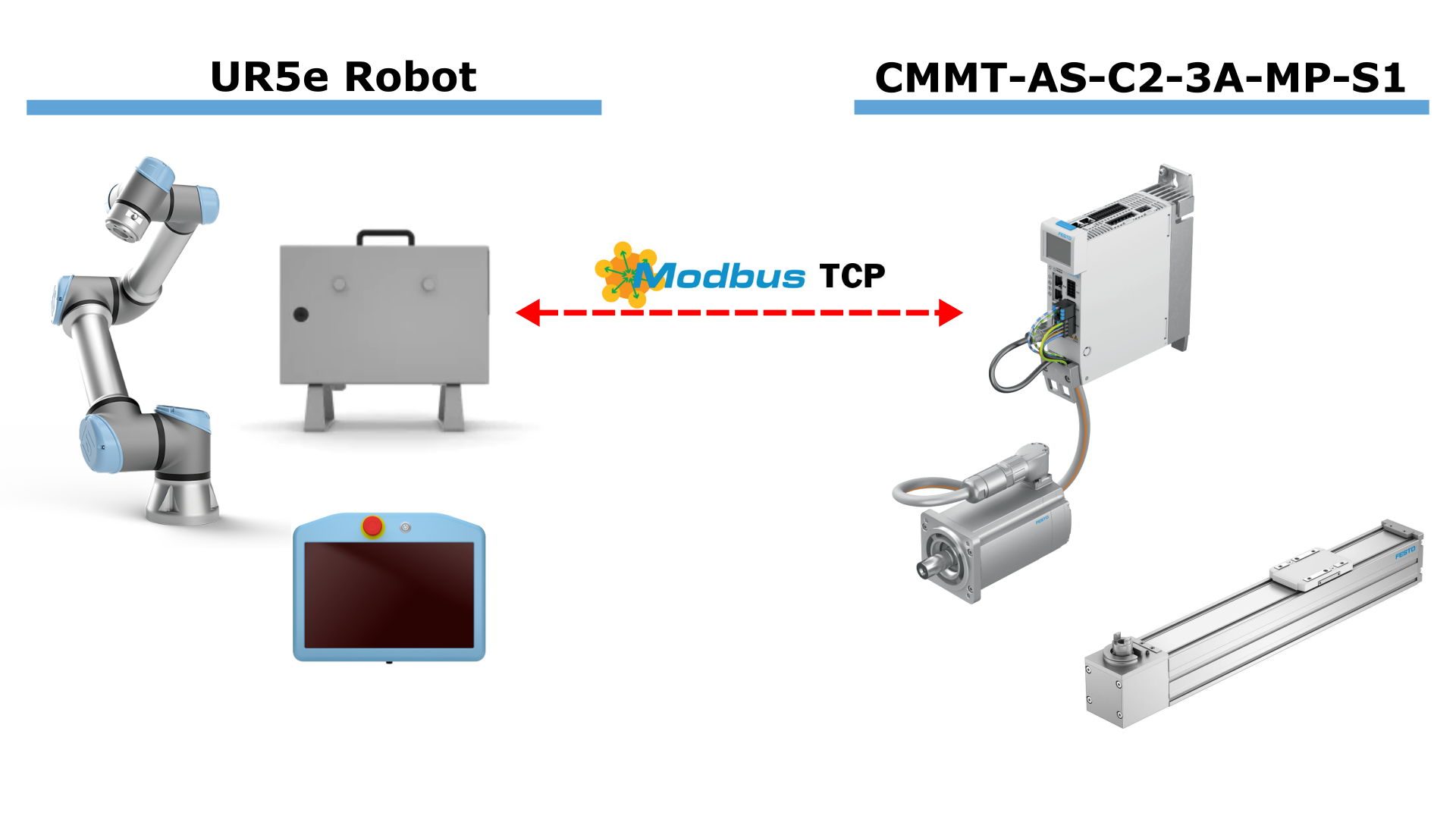
Abbildung: Beispielkonfiguration eines UR5e‑Roboters mit angeschlossenem Festo‑Servoantrieb.
Der zusätzliche Antrieb kann beispielsweise eine Linearachse oder einen Drehtisch bewegen. Welche mechanische Einrichtung damit tatsächlich angetrieben wird, wird im Antriebsregler über die Festo Automation Suite parametriert. Die URCap unterstützt dabei aktuell die Maßeinheiten Millimeter (für Linearachsen) und Grad (für Drehachsen).

Abbildung: Festo Automation Suite, die zum Parametrieren des Antriebsreglers verwendet wird.
Nachdem der Antriebsregler mit der Festo Automation Suite parametriert wurde, kann er mit der Robotersteuerung gekoppelt werden und steht anschließend im Roboterprogramm zur Verfügung.
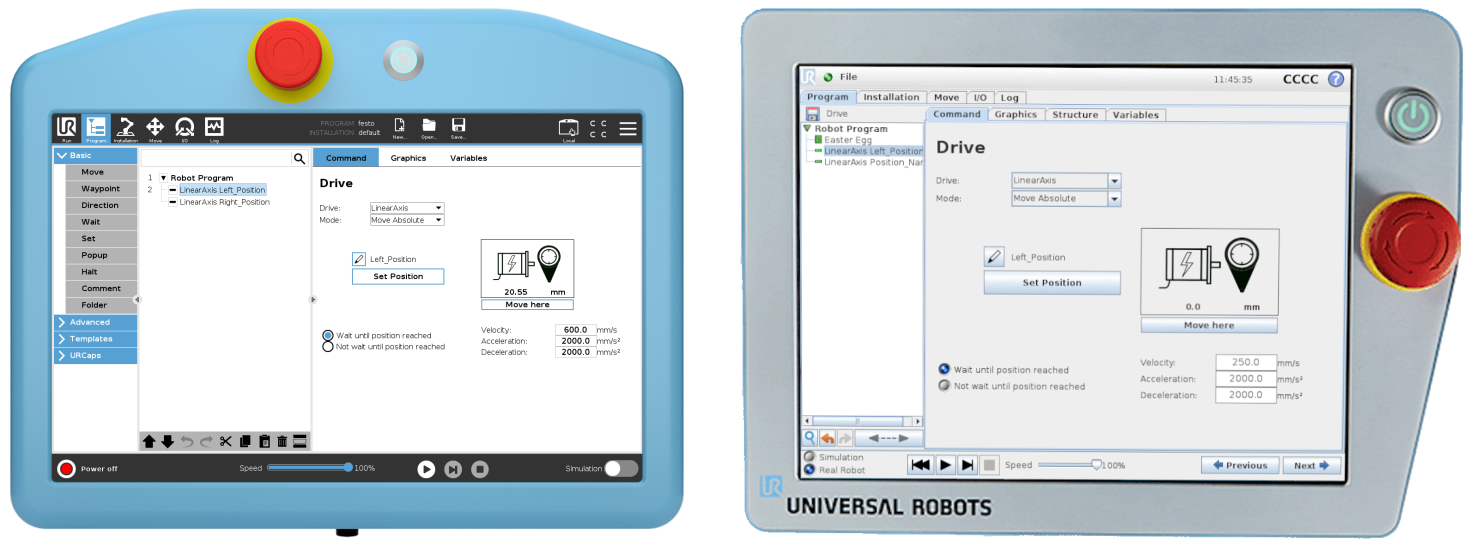
Abbildung: Polyscope 5 und Polyscope 3 esaDrive.