Inbetriebnahme
Sicheren Ausgang konfigurieren
Damit der Antrieb im Fall eines Roboter‑Emergency‑Stops zuverlässig abgeschaltet wird, kann beispielsweise einer der sicheren digitalen Roboter‑Ausgänge mit dem STO‑Eingang des Antriebsreglers verknüpft werden. Die digitalen sicheren Ausgänge des Roboters können im Teachpanel unter Installation → Sicherheit → E/A eingestellt werden. In unserem Beispiel wird das Ausgangspaar CO0 / CO1 verwendet.
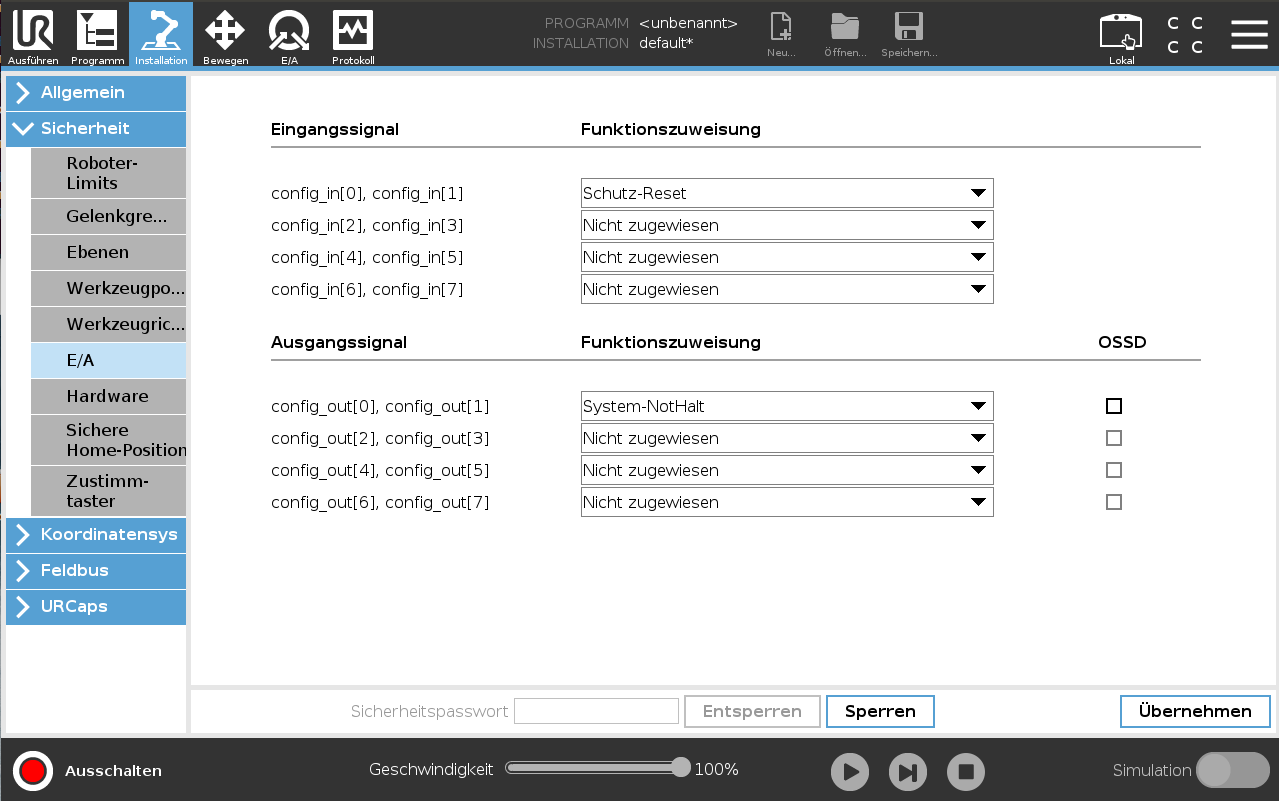
Abbildung: Auswahl eines sicheren Ausgangspaars (CO0/CO1) als STO‑Signal im Teachpanel.
IP‑Adresse des Roboters einstellen
Damit der Roboter mit dem Antriebsregler kommunizieren kann, müssen sich beide Geräte im selben Subnetz befinden. Öffnen Sie dazu über das „Hamburger‑Menü“ in der oberen rechten Ecke des Teachpanels die Einstellungen. Im Tab System finden Sie die Netzwerkeinstellungen. Es wird empfohlen, dem Roboter eine statische IP‑Adresse zuzuweisen.
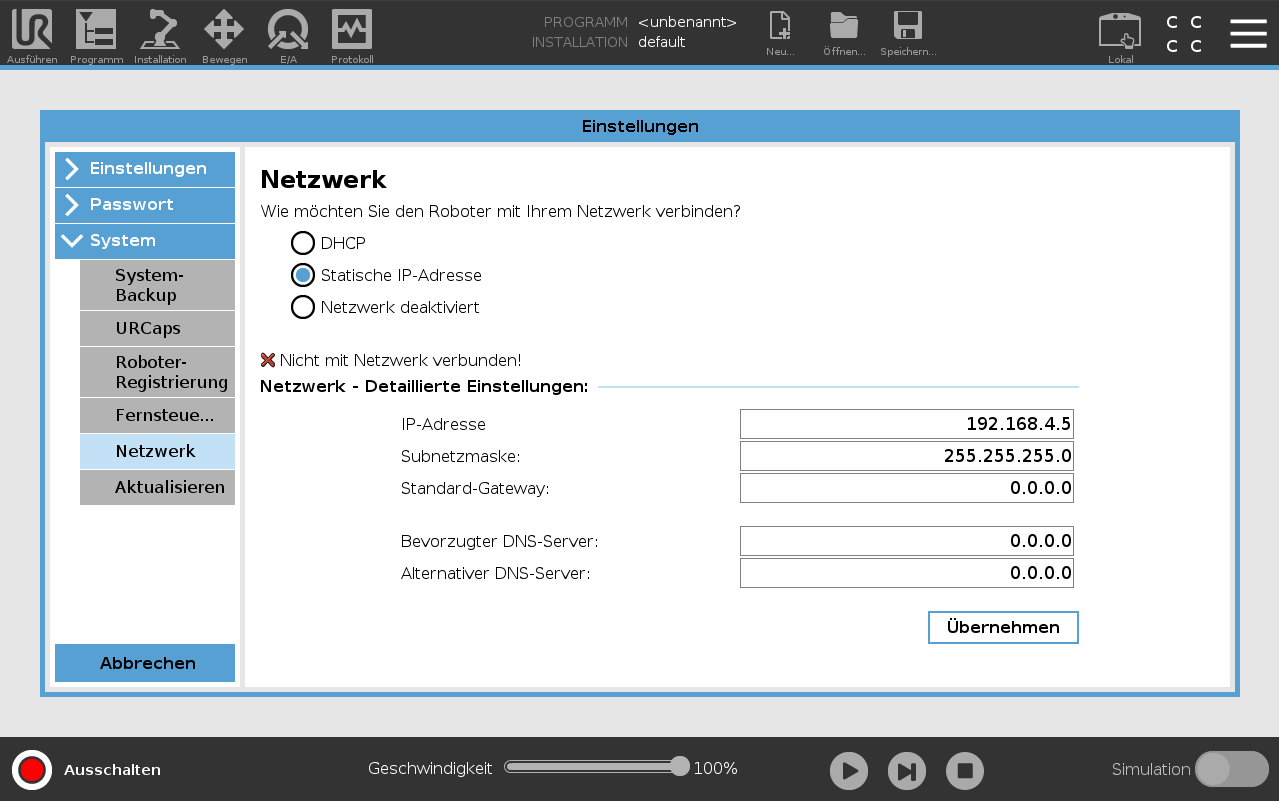
Abbildung: Netzwerk‑Einstellungen im Teachpanel zur Konfiguration der IP‑Adresse des Roboters.
Netzwerk‑Freigabe
Damit das URCap esaDrive über die Netzwerkverbindung mit dem Antriebsregler kommunizieren kann, muss sichergestellt werden, dass die Netzwerkports der Robotersteuerung nicht blockiert sind. Öffnen Sie dazu über das „Hamburger‑Menü“ in der oberen rechten Ecke des Teachpanels die Einstellungen. Unter Sicherheit → Allgemein können Sie die Ports, wie im nachfolgenden Bild dargestellt, freigeben:
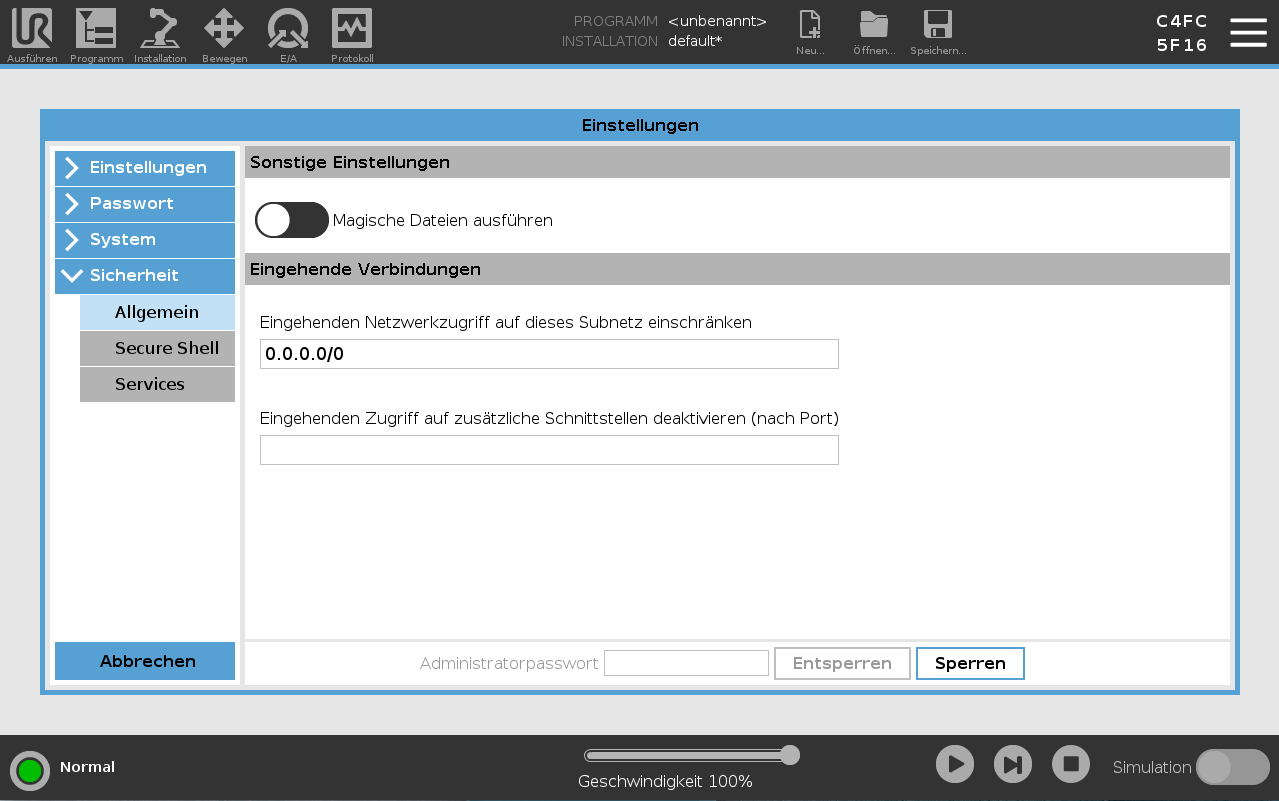
Abbildung: Netzwerk‑Freigaben im Teachpanel, damit Modbus‑TCP und andere URCap‑Verbindungen nicht blockiert werden.
URCap installieren
Damit die URCap esaDrive verwendet werden kann, muss sie zunächst auf der Robotersteuerung installiert werden. Dazu die Installationsdatei mit der Endung .urcap auf einen USB‑Stick kopieren und diesen in einen USB‑Port der Robotersteuerung (am Teachpanel oder im Schaltschrank) stecken.
Über das „Hamburger‑Menü“ in der oberen rechten Ecke des Teachpanels unter Einstellungen → System → URCaps lässt sich die Installation starten. Auf das Plus‑Symbol klicken, als Quelle den USB‑Stick auswählen und die .urcap‑Datei laden. Nach erfolgreicher Installation erscheint esaDrive in der Liste der verfügbaren URCaps.
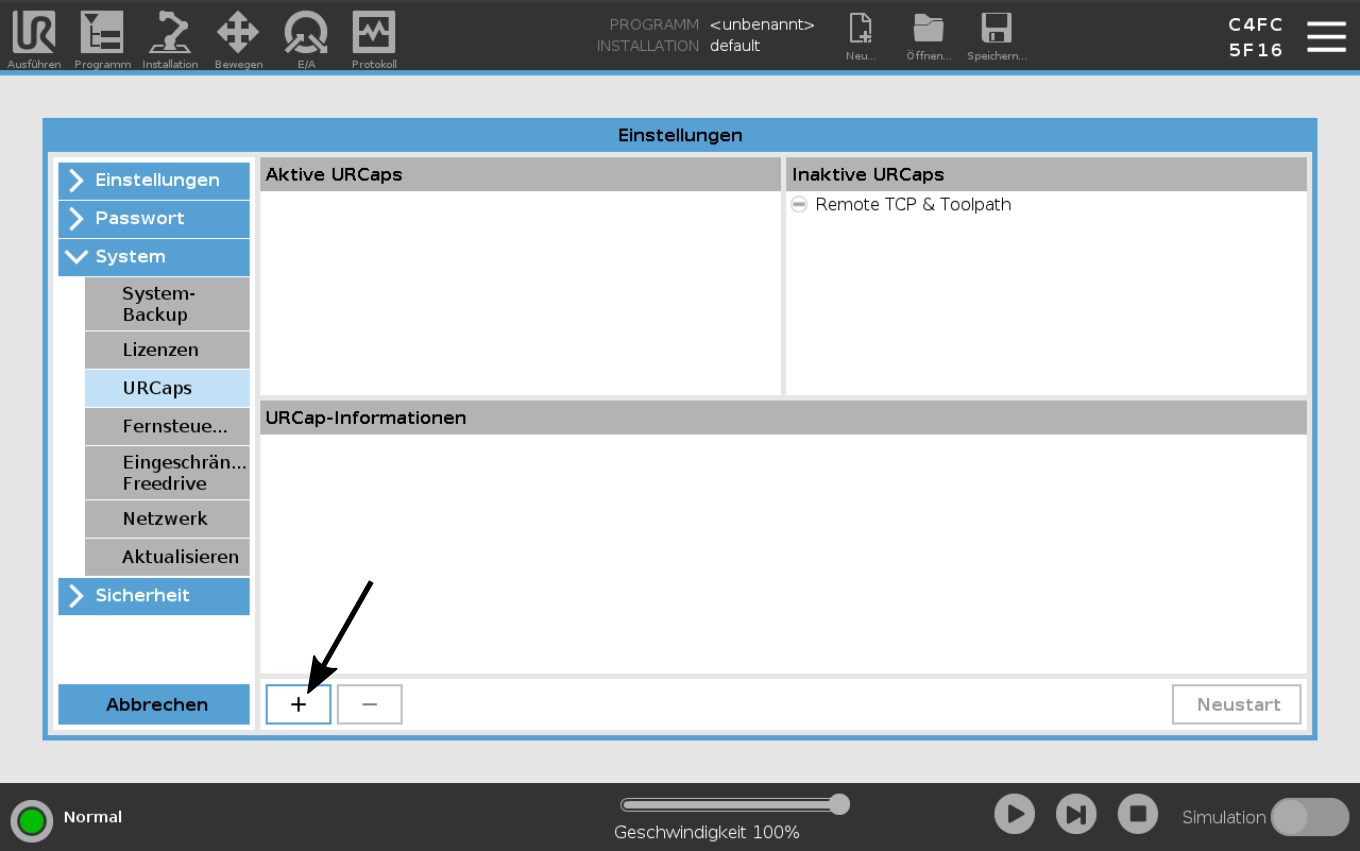
Abbildung: URCap‑Installation
Antrieb koppeln
Nachdem der Antriebsregler erfolgreich mit der Festo Automation Suite parametriert wurde, kann er mit der Robotersteuerung gekoppelt werden. Navigieren Sie im Teachpanel zu Installation → URCaps und öffnen Sie dort das Fenster Drives. Die Liste zeigt alle bereits gekoppelten Antriebe. Um einen neuen Antrieb hinzuzufügen, klicken Sie auf das grüne Plus‑Symbol. Die URCap führt anschließend automatisch einen Netzwerkscan durch und erkennt alle verfügbaren Antriebsregler im Netzwerk. Sobald Sie den gewünschten Antrieb auswählen, wird er mit dem Roboter gekoppelt.
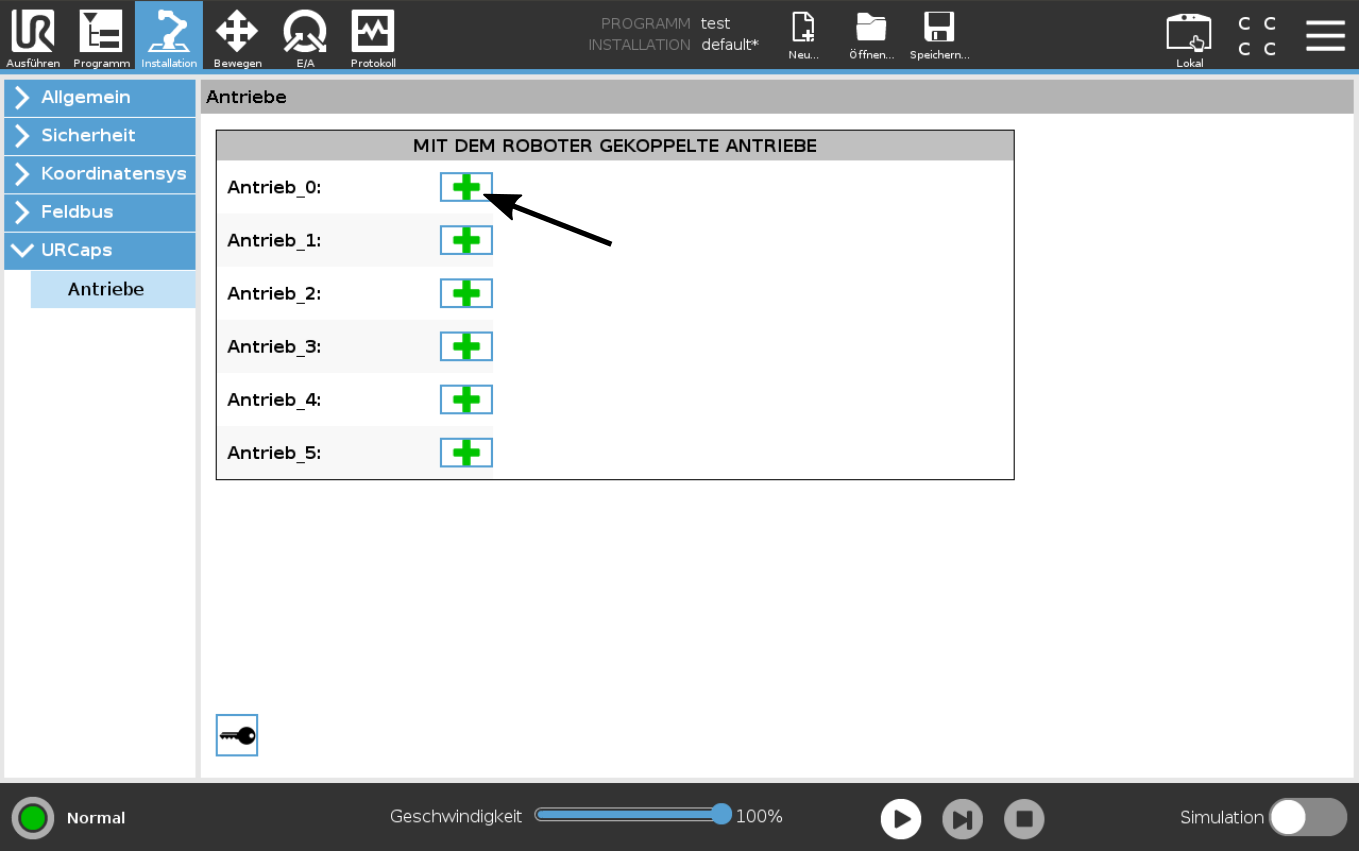
Abbildung: Drives‑Fenster mit Übersicht der bereits gekoppelten Antriebe.