Installation
Dieses Kapitel beschreibt den Anschluss eines Festo‑Antriebs an die Universal Robots‑Steuerung am Beispiel des Servoantriebsreglers CMMT‑AS, der seine 24 V DC‑Steuerspannung direkt von der Robotersteuerung bezieht. Damit der Antrieb im Falle eines Emergency‑Stops zuverlässig abgeschaltet wird, wird der STO‑Eingang des Antriebsreglers mit einem der sicheren, konfigurierbaren Ausgänge der Robotersteuerung verbunden.
Beispiel Schaltplan Anschluss CMMT‑AS
-
Steuerspannung (24 V DC)
Verbinden Sie den 24 V DC‑Ausgang der Robotersteuerung mit dem 24 V DC‑Eingang am CMMT‑AS.
Hinweis: Diese Direktversorgung funktioniert nur, wenn keine weiteren Verbraucher angeschlossen sind und nur ein CMMT‑AS verwendet wird. -
Modbus‑TCP
Ethernet‑Kabel von „Ethernet Port“ der Robotersteuerung zum RJ45‑Port des CMMT‑AS. -
Emergency‑Stop (STO)
Konfigurierbarer Ausgang der Robotersteuerung (Safety Output) mit dem STO‑Eingang am CMMT‑AS verbinden.
Hinweis: Der konfigurierbare Ausgang CO0/CO1 muss in der Robotersteuerung so konfiguriert werden, dass er mit dem Emergency‑Stop verknüpft ist.
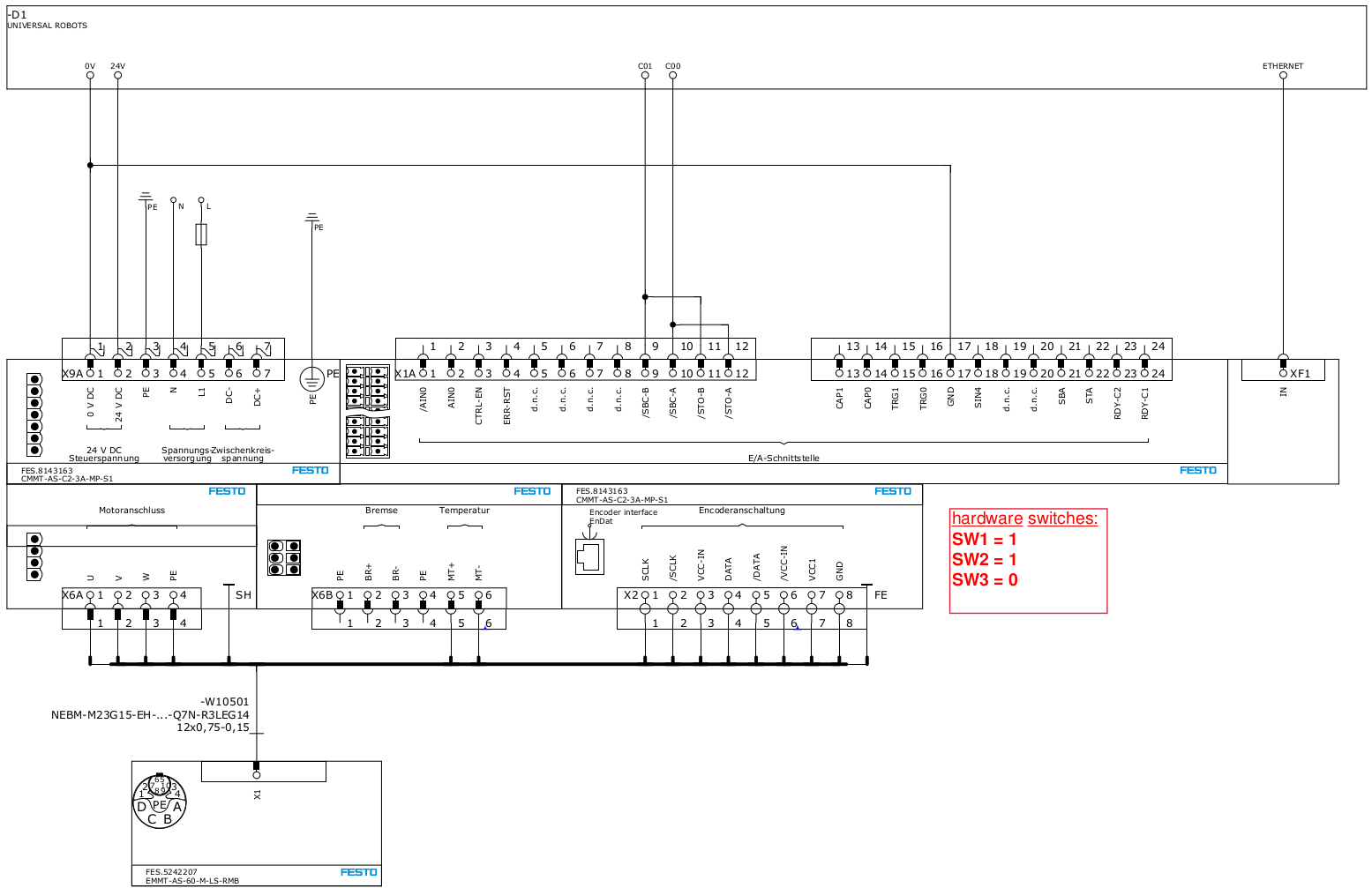
Abbildung: Beispiel Anschluss eines CMMT‑AS Servoantriebsreglers an die UR‑Steuerung.
Tipp:
- Falls Sie mehrere Antriebe installieren oder weitere Verbraucher an den 24 V‑Ausgang anschließen möchten, verwenden Sie unbedingt ein separates DC‑Netzteil, um eine ausreichend dimensionierte Versorgung sicherzustellen.
- Bei CMMT‑ST‑Antriebsreglern ist in jedem Fall ein separates DC‑Netzteil erforderlich.
⚠️ ACHTUNG: Der Schaltplan ist nur ein Beispiel. Die elektrische Installation darf ausschließlich von einer qualifizierten Elektrofachkraft durchgeführt werden und muss an die regionalen Vorschriften sowie Sicherheitsrichtlinien angepasst werden!!!
Protokoll‑Wahlschalter
Die von der esaDrive URCap unterstützten Festo‑Antriebsregler sind sogenannte Multiprotokoll‑Geräte, die mehrere Busprotokolle beherrschen. Damit die Regler nach dem Einschalten standardmäßig auf Modbus‑TCP arbeiten, müssen die DIP‑Wahlschalter am Gehäuse wie folgt eingestellt sein:
- SW1 = 1
- SW2 = 1
- SW3 = 0
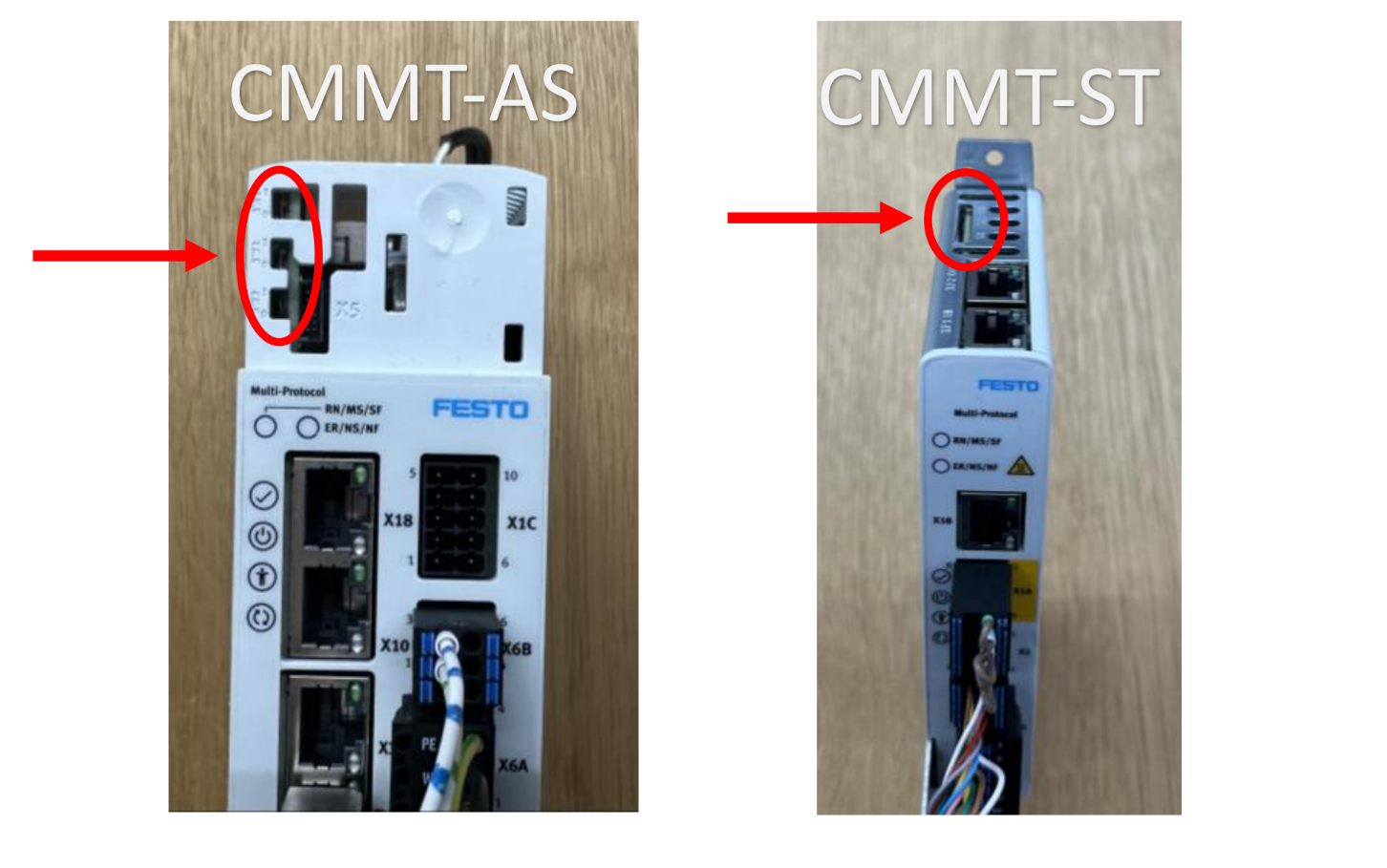
Abbildung: Protokoll DIP‑Wahlschalter an einem Festo CMMT‑AS und CMMT‑ST Antriebsregler.