Programmbefehle
Sobald ein Antrieb erfolgreich mit dem Roboter gekoppelt ist, lässt er sich in einem Roboterprogramm verwenden. Um einen Befehl hinzuzufügen, wechsle zum Tab URCaps und wähle Antrieb. Im rechten Bereich dann zunächst den gewünschten Antrieb und anschließend den Befehl auswählen.
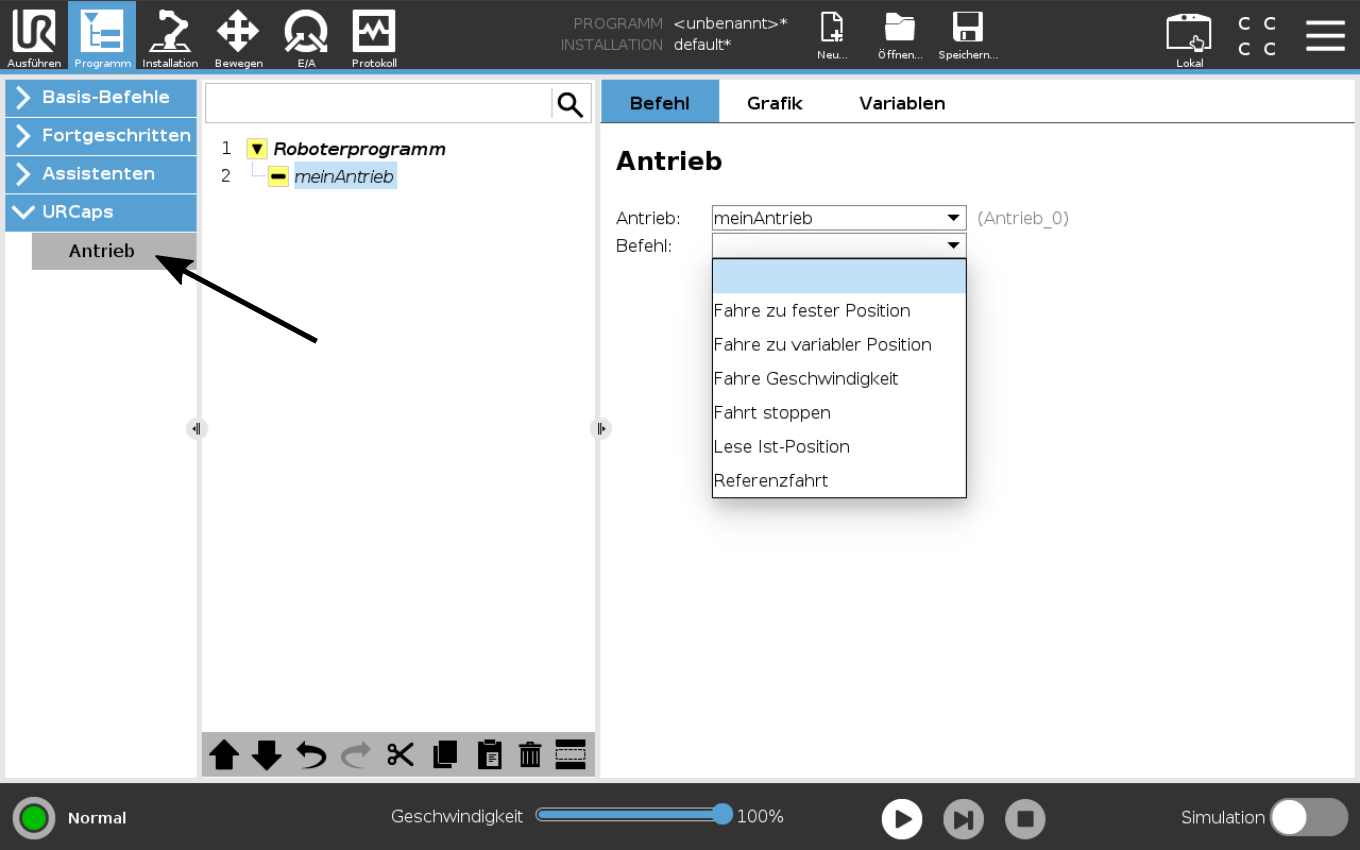
Abbildung: Neuen Antriebsbefehl zum Roboterprogramm hinzufügen.
Nachfolgend werden die einzelnen Befehle erläutert.
Fahre zu fester Position
Mit diesem Befehl fährt der Antrieb zu einer zuvor gespeicherten Position. Über Position festlegen wird die Zielposition eingelernt und oberhalb des Buttons Hierher bewegen angezeigt. Zum Testen lässt sich der Roboter über Hierher bewegen manuell an diese Position fahren. Mit Position_Name kann der Position ein aussagekräftiger Name gegeben werden. Über die Radio‑Buttons Warten bis Position erreicht bzw. Bewegung simultan ausführen wird festgelegt, ob das Programm bis zum Erreichen der Zielposition wartet oder sofort mit dem nächsten Schritt im Roboterprogramm fortfährt.
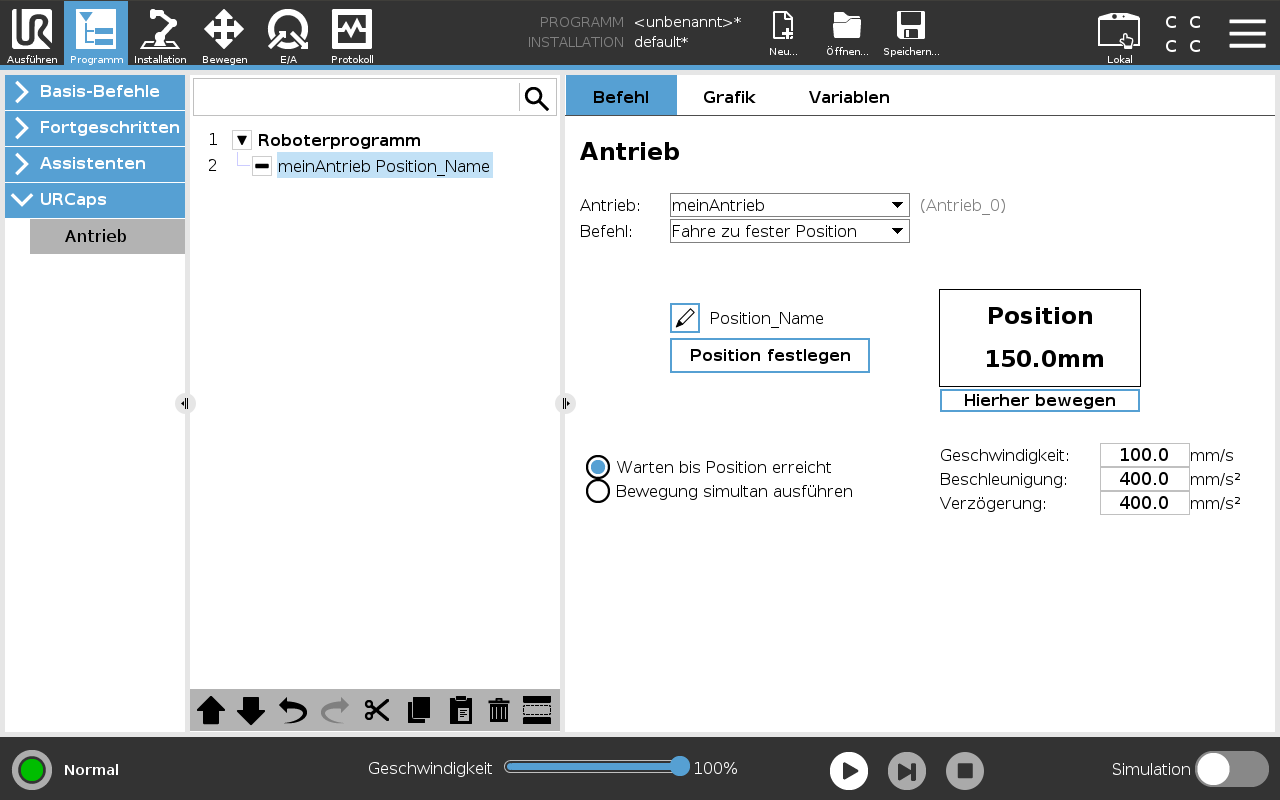
Abbildung: Befehl, mit dem der Antrieb an eine feste Position gefahren wird.
Fahre zu variabler Position
Mit diesem Befehl fährt der Antrieb zu einer Zielposition, die zur Laufzeit des Roboterprogramms über eine Variable übergeben wird. Dabei muss sichergestellt sein, dass der Variablenwert in der korrekten Einheit vorliegt – Meter für Linearachsen, Grad für Drehachsen. Über die Radio‑Buttons Warten bis Position erreicht bzw. Bewegung simultan ausführen wird festgelegt, ob das Programm bis zum Erreichen der Zielposition wartet oder sofort mit dem nächsten Schritt im Roboterprogramm fortfährt.
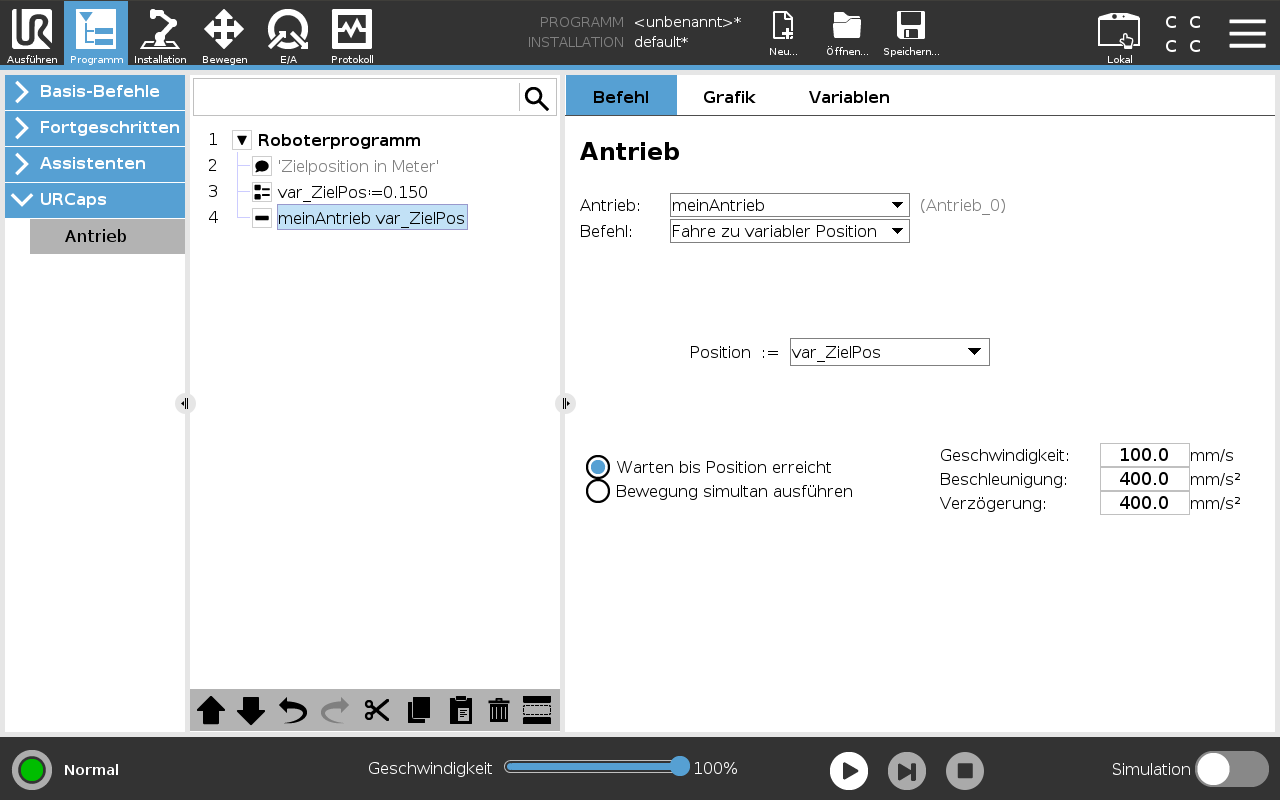
Abbildung: Befehl, mit dem der Antrieb an eine variable Position gefahren wird.
Fahre Geschwindigkeit
Dieser Befehl bewegt den Antrieb kontinuierlich mit einer vorgegebenen Geschwindigkeit in eine Richtungen, bis er durch den Befehl Fahrt stoppen angehalten wird. Die Bewegungsrichtung lässt sich über die Radio‑Buttons Positive Richtung bzw. Negative Richtung festlegen. Dieser Befehl eignet sich besonders für Endlosachsen oder Förderbänder ohne mechanische Endanschläge.

Abbildung: Befehl, mit dem der Antrieb mit konstanter Geschwindigkeit bewegt wird.
Fahrt stoppen
Dieser Befehl hält den Antrieb an, nachdem er zuvor mit dem Befehl Fahre Geschwindigkeit in Bewegung gesetzt wurde. Über die Radio‑Buttons Warten bis Antrieb stillsteht bzw. Stoppvorgang simultan ausführen wird festgelegt, ob das Programm erst wartet, bis der Antrieb vollständig gestoppt ist, oder sofort mit dem nächsten Befehl im Roboterprogramm fortfährt.
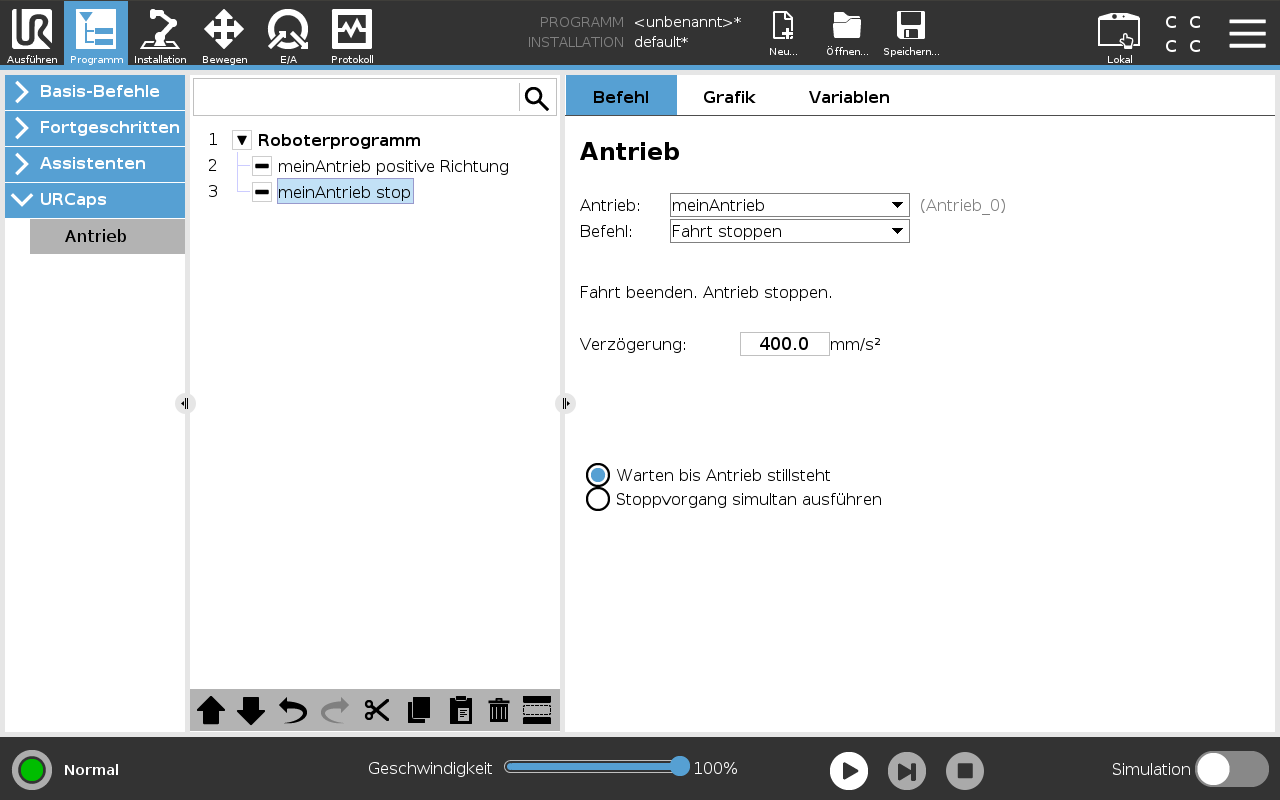
Abbildung: Befehl, mit dem der Antrieb gestoppt wird.
Lese Ist‑Position
Mit diesem Befehl wird die aktuelle Position des Antriebs aus dem Antriebsregler ausgelesen und in die ausgewählte Roboterprogramm‑Variable geschrieben. Dabei ist die verwendete Maßeinheit zu beachten: Meter für Linearachsen, Grad für Drehachsen.
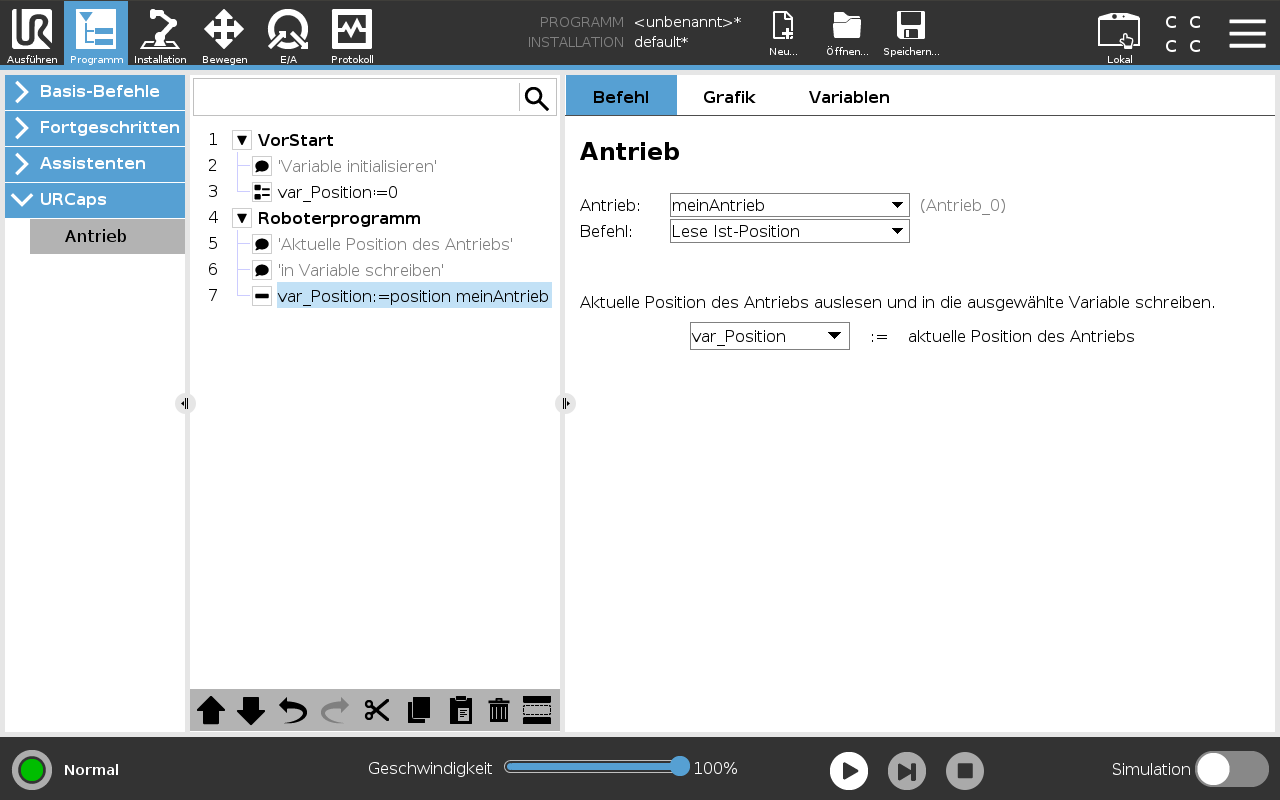
Abbildung: Befehl, mit dem die aktuelle Antriebsposition in eine Variable geschrieben wird.
Referenzfahrt
Mit diesem Befehl wird für den ausgewählten Antrieb eine Referenzfahrt (Homing) durchgeführt. Über die Radio‑Buttons immer neu referenzieren bzw. nur wenn es sein muss lässt sich festlegen, ob die Referenzfahrt stets ausgeführt wird oder nur dann, wenn der Antrieb noch nicht referenziert ist. Dieser Befehl ist insbesondere für Antriebe mit Inkrementalencoder gedacht, da diese nach jedem spannungsfreien Zustand neu referenziert werden müssen. Mit der Position des Homing‑Befehls im Roboterprogramm lässt sich außerdem verhindern, dass es während der Referenzfahrt zu Kollisionen kommt.
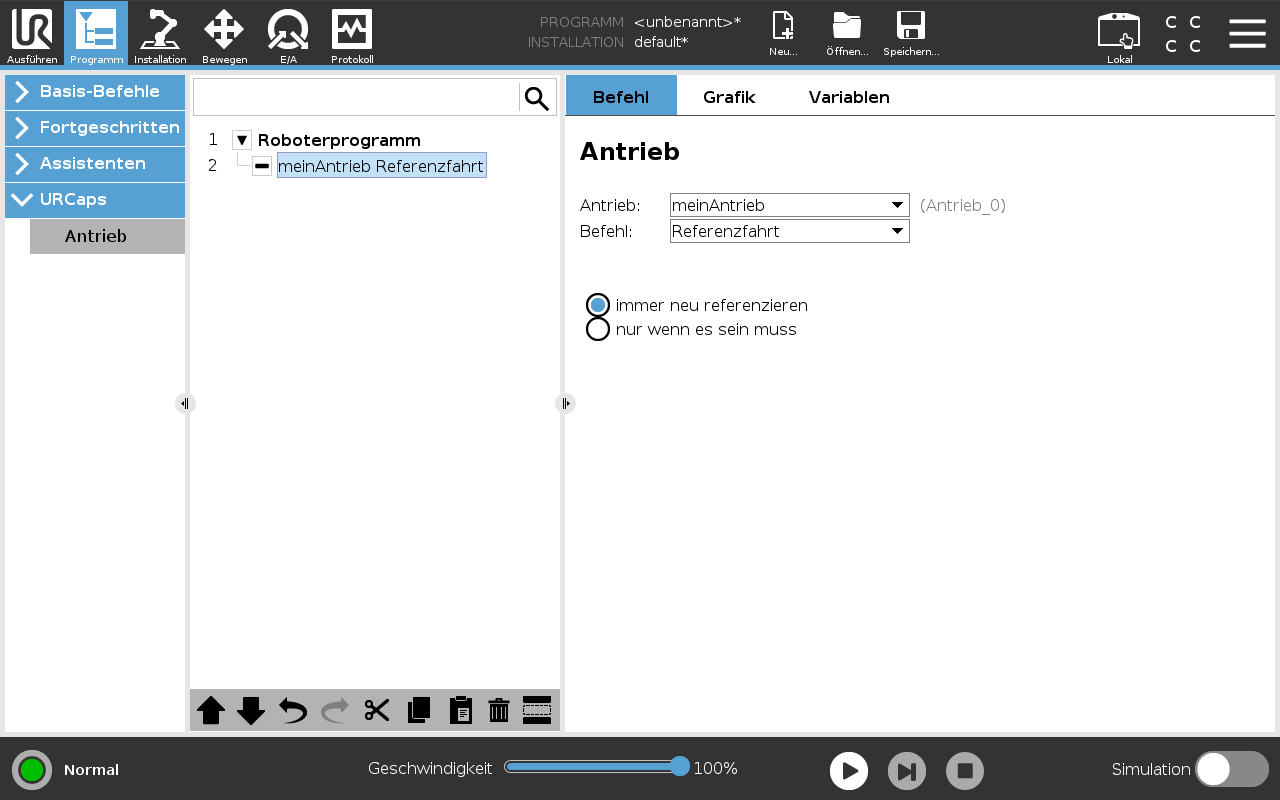
Abbildung: Befehl zum Ausführen einer Referenzfahrt (Homing) für einen Antrieb.