Einstellungen
Sobald ein Antrieb erfolgreich mit der Robotersteuerung gekoppelt ist, erscheint er in der Liste der gekoppelten Antriebe. Ein Klick auf das Zahnradsymbol öffnet das Einstellungsmenü des jeweiligen Antriebs.
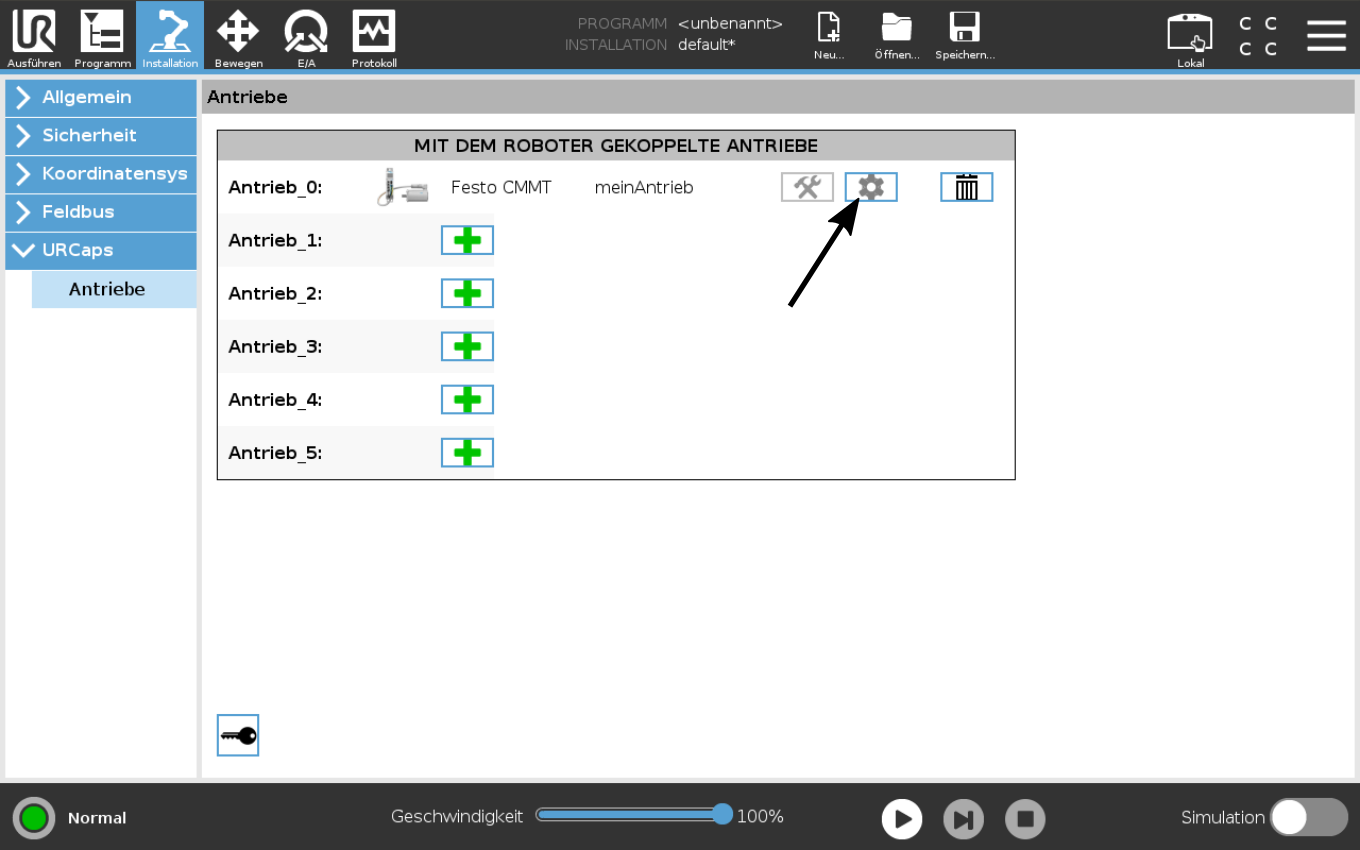
Abbildung: Schaltfläche zum Öffnen des Einstellungsmenüs eines Antriebs.
Im folgenden Bild ist das Einstellungsmenü dargestellt:
- Ausgegraute Felder: Dienen ausschließlich der Information und können nicht geändert werden.
- Aktive Eingabefelder: Hier lassen sich Parameter direkt in der URCap anpassen.
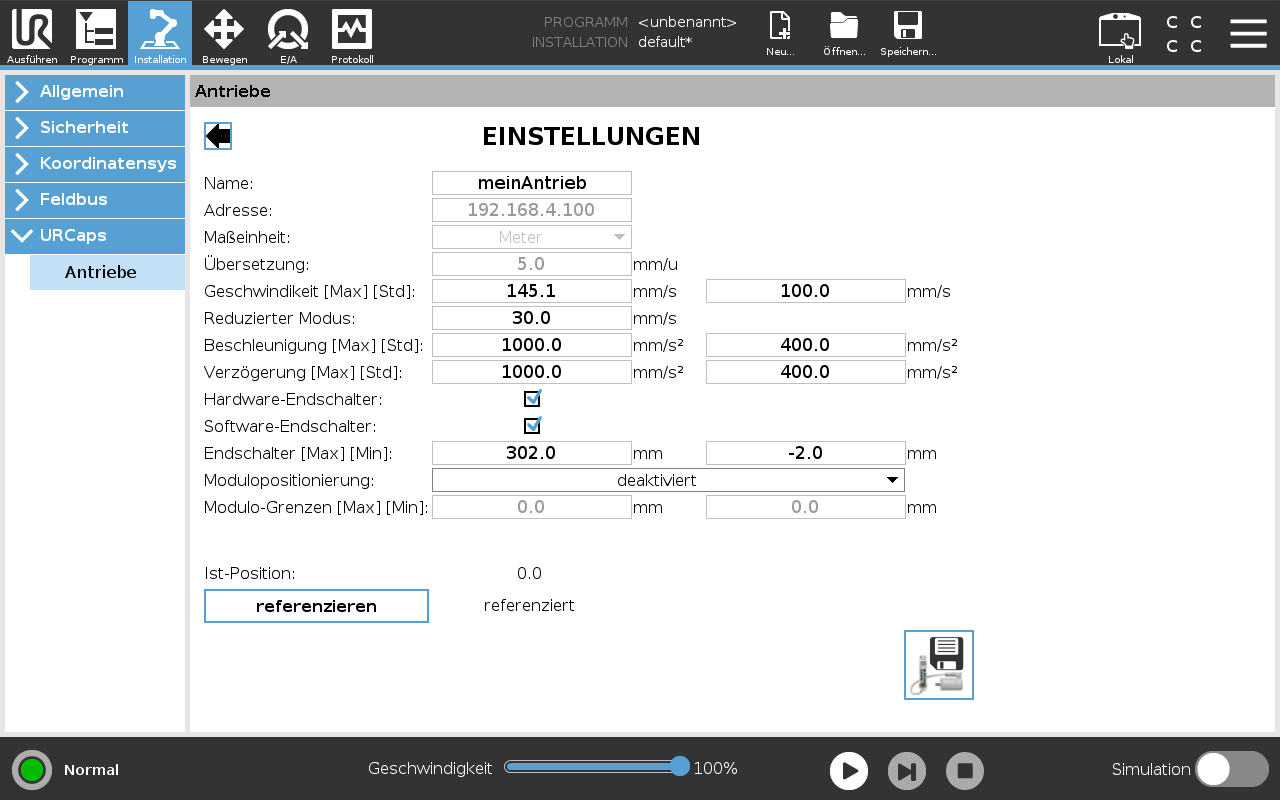
Abbildung: Einstellungsmenü eines Antriebs.
Name
Alias des Antriebs. Ein aussagekräftiger Name verbessert die Verständlichkeit im Roboterprogramm.
Adresse
IP‑Adresse des Antriebsreglers. Beim Verbindungsaufbau sucht die Robotersteuerung nach diesem Gerät.
Maßeinheit
Maßeinheit, wie sie im Antriebsregler parametrisiert ist: Meter für Linearachsen, Grad für Drehachsen.
Übersetzung
Verhältnis zwischen Motorumdrehungen und Bewegungseinheit der Mechanik. Bei einer Linearachse gibt die Übersetzung z. B. an, wie viele Millimeter die Achse pro Motorumdrehung zurücklegt.
Geschwindigkeit Max
Maximale Geschwindigkeit, die im Roboterprogramm für einen Bewegungsbefehl eingegeben werden kann.
Geschwindigkeit Std
Standardgeschwindigkeit, die in neue Bewegungsbefehle übernommen wird. Geschwindigkeit wenn Antrieb im Handbetrieb (Speed‑Slider auf 100 %) bewegt wird.
Beschleunigung Max
Maximale Beschleunigung, die im Roboterprogramm für einen Bewegungsbefehl eingegeben werden kann.
Beschleunigung Std
Standardbeschleunigung, die in neue Bewegungsbefehle übernommen wird.
Verzögerung Max
Maximale Verzögerung (Deceleration), die im Roboterprogramm eingestellt werden kann.
Verzögerung Std
Standardverzögerung, die in neue Bewegungsbefehle übernommen wird.
Hardware‑Endschalter
Aktiviert die an den Antriebsregler angeschlossenen Hardware‑Endschalter.
Achtung: Ist diese Option deaktiviert, stoppt der Regler nicht, wenn ein Endschalter ausgelöst wird.
Software‑Endschalter
Aktiviert die softwareseitigen Endschaltergrenzen.
Achtung: Ohne diese Begrenzung kann der Regler über die definierten Punkte hinaus fahren.
Endschalter Max
Oberer Grenzwert für den Software‑Endschalter.
Endschalter Min
Unterer Grenzwert für den Software‑Endschalter.
Modulpositionierung
Legt fest, wie der Regler in einem zyklischen Positionsbereich (Modulo) fährt:
- Deaktiviert: Keine zyklische Behandlung.
- Kürzester Weg innerhalb der Grenzen: Bewegung bleibt innerhalb des Modulo‑Bereichs und wählt den kürzesten Pfad.
- Kürzester Weg über die Grenzen: Ignoriert die Modulo‑Grenzen und wählt den kürzesten Pfad.
Modulo‑Grenzen Max
Oberer Grenzwert des Modulo‑Bereichs.
Modulo‑Grenzen Min
Unterer Grenzwert des Modulo‑Bereichs.
Speichern
Einige Parameter werden parallel im Antriebsregler gespeichert. Nach einer Änderung in der URCap müssen diese Werte mit dem Speichern‑Button unten rechts im Einstellungsdialog auf den Regler übertragen werden.

Abbildung: Schaltfläche zum Übertragen geänderter Parameter in den Antriebsregler.